ポイントクラウド
ポイントクラウドデータをビューポートで確認する方法を説明します。
ポイントクラウド(Point Cloud)は、3DスキャナーやLiDARで取得した3次元点群データです。
建物内部や外部の形状を精密に記録し、実際の空間を基に形状を作成する際の参照資料として活用されます。
ポイントクラウドデータの検索
AMapper For ARC eyeでは、各Locationごとにポイントクラウドデータがすでに読み込まれています。追加の設定なしですぐに確認できます。
基本提供されるReference ステージでポイントクラウドアイテムを見つけることができます。
- 左の階層構造パネルでReference ステージを見つけます。
- 下位にある ポイントクラウドを確認します。
- 可視性トグルアイコンで可視性を切り替えられます。
ポイントクラウド情報の確認
下部ステータスバーでポイントクラウドの現在の状態を確認できます。
| 項目 | 説明 |
|---|---|
| Depth | 現在適用中の深度レベル制限 |
| Points | 現在レンダリング中のポイント数 |
| Nodes | ロード済みノード数 / マークされたノード数 |
詳細表示(深度レベル増加)
ポイントクラウドはデフォルトで低い深度レベルで表示されます(デフォルト:2)。
| ショートカット | 説明 |
|---|---|
| Z | 深度レベル制限を1段階増加(最大8) |
- 深度レベルが増加すると、より細かいポイントがロードされ、詳細な形状を確認できます。
- ビューポートを移動またはズームする際は自動的に低い深度レベルに切り替わります。
ポイントクラウドデータは数百万〜数億個の点で構成されています。すべての点を同時にレンダリングすると、
- パフォーマンス低下 - GPUメモリとレンダリングパフォーマンスに負担がかかります。
- ネットワーク負荷 - 大容量データのロードに時間がかかります。
そのため、必要な時のみZを押して詳細表示に切り替え、ビューポート操作時には自動的に簡略表示に切り替わります。
ポイントクラウドプロパティの調整
ポイントクラウドを選択すると、右プロパティパネルで様々な表示オプションを調整できます。
作業環境に合わせて設定を変更すると、形状作図時により正確な参照が可能になります。
Transform
ポイントクラウドの座標系を設定します。
| プロパティ | 説明 |
|---|---|
| Coordinate System | ポイントクラウドデータの座標系を指定します。 |
Coordinate System
AMapperのデフォルト座標系は**右手座標系 Y-Up(Right-handed, Y-Up)**です。ポイントクラウドデータの元の座標系がこれと異なる場合、正しい座標系を選択して変換できます。
| 座標系の例 | 説明 |
|---|---|
| Left-handed, Y-Up | Unity座標系 |
| Left-handed, Z-Up | Unreal Engine座標系 |
| Right-handed, Y-Up | AMapperデフォルト、Maya、Houdini座標系 |
| Right-handed, Z-Up | 3DS Max、Blender、AutoCAD、SketchUp座標系 |
AMapper For ARC eyeではポイントクラウド座標系が変換時点ですでに一致しているため、別途調整する必要はありません。
ただしポイントクラウドが反転していたり回転している場合、元のデータの座標系が異なる可能性があるので、この設定を確認してください。
Material
ポイントクラウドの視覚的表現方式を設定します。Standard、EDL、Custom の3つのモードから選択できます。
各モードは設定値を独立して維持します。Custom モードで変更した値は Standard モードに切り替えても適用されず、逆も同様です。
Standard モード
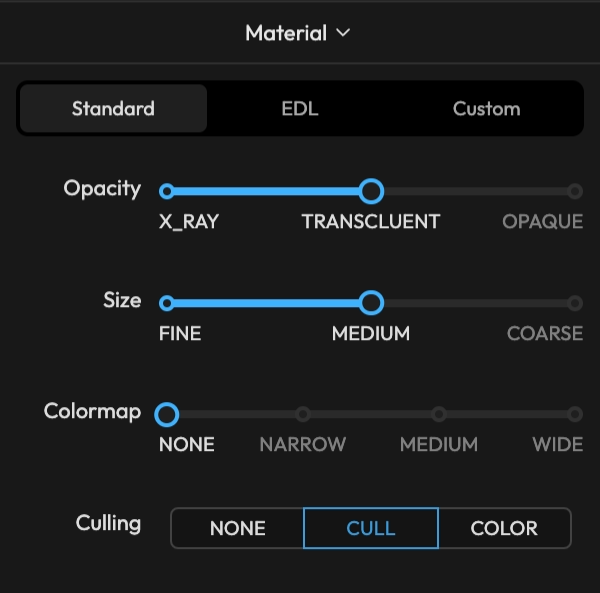
よく使用するベストプラクティスの組み合わせをスライダーで素早く適用できるテンプレートモードです。
| オプション | 値 | 説明 |
|---|---|---|
| Opacity | X-Ray | ポイントがほぼ透明に表示されます。形状作図時にポイントクラウドが邪魔にならないようにする際に有用です。 |
| Translucent | 半透明に表示されます。 | |
| Opaque | 完全不透明に表示されます。Depth Test / Depth Write が自動的に有効になります。 | |
| Size | Fine | 小さいポイントサイズで表示されます。 |
| Medium | 中程度のポイントサイズで表示されます。 | |
| Coarse | 大きいポイントサイズで表示されます。 | |
| Colormap | None | 単一色で表示します。 |
| Narrow | ワールド原点基準 ±25m 高度範囲を色で表現します。 | |
| Medium | ワールド原点基準 ±50m 高度範囲を色で表現します。 | |
| Wide | ワールド原点基準 ±100m 高度範囲を色で表現します。 | |
| Culling | None | Stage ROI カリングを使用しません。 |
| Cull | Stage ROI 外部のポイントを非表示にします。 | |
| Color | Stage ROI 外部のポイントを別の色で表示します。 |
Standard モードでは Size は常に Adaptive Size が有効な状態で動作します。ポイントサイズがカメラとの距離に反比例して自動調整されます — カメラに近いほど大きく、遠いほど小さく表示されます。
ポイントの高度(Y 座標)に応じてレインボー色を適用します。高度範囲はワールド原点(Y=0)基準で、範囲外のポイントは端の色にクランプされます。建物が複数階にわたる場合、階ごとにポイントを色で区別するのに有用です。
Culling は Stage ROI(OBB)が設定されている場合にのみ有効です。Stage ROI がない場合、Culling 設定に関係なくすべてのポイントが表示されます。
EDL モード
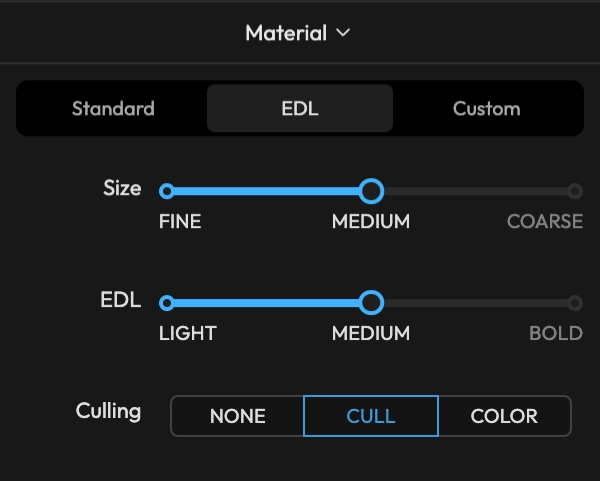
EDL(Eye Dome Lighting)を活用したモードです。隣接ポイント間の深度差を検出して境界部分を暗く表現するため、ポイントクラウドの 3D 形状と輪郭がより鮮明に見えます。常に不透明度 1.0、Depth Test/Write が有効な状態でレンダリングされます。
| オプション | 値 | 説明 |
|---|---|---|
| Size | Fine / Medium / Coarse | Standard モードと同じ |
| EDL | Light | 控えめな深度強調 |
| Medium | 中程度の深度強調 | |
| Bold | 強い輪郭強調 | |
| Culling | None / Cull / Color | Standard モードと同じ |
Custom モード
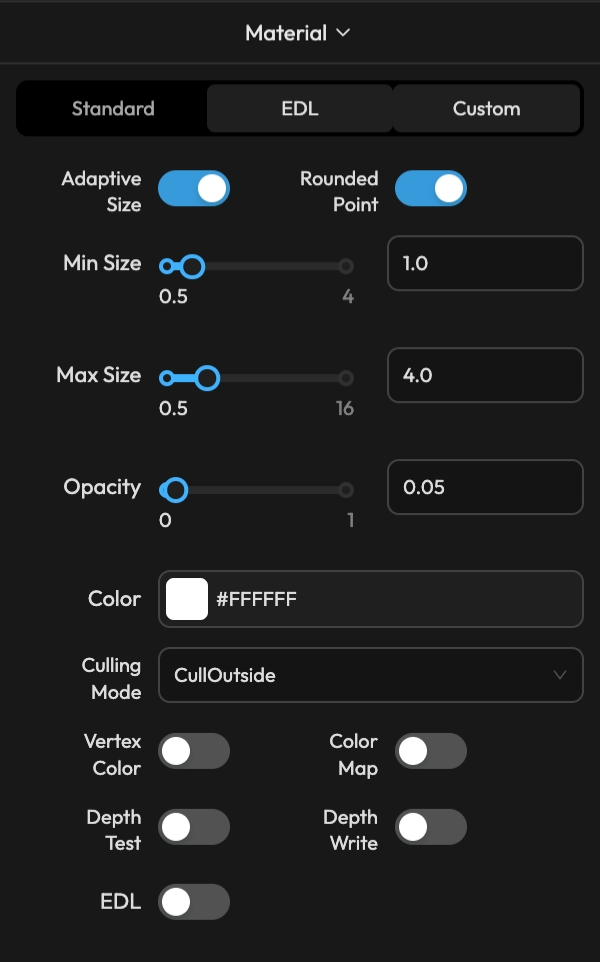
すべてのパラメータを直接調整できるモードです。
| オプション | 説明 |
|---|---|
| Adaptive Size | ON: カメラ距離に反比例してポイントサイズが自動調整されます。Min Size ~ Max Size の範囲内で変化します。OFF: 固定サイズを使用します。 |
| Rounded Point | ON: ポイントが円形でレンダリングされます。OFF: 正方形でレンダリングされます。 |
| Size | Adaptive Size OFF 時の固定ポイントサイズを設定します。 |
| Min Size | Adaptive Size ON 時の最小ポイントサイズです。 |
| Max Size | Adaptive Size ON 時の最大ポイントサイズです。 |
| Opacity | ポイントの不透明度を設定します。 |
| Color | Vertex Color と Color Map が両方 OFF の場合に単一色で表示します。 |
| Culling Mode | Disabled: カリングなし / CullOutside: Stage ROI 外部を非表示 / ColorOutside: Stage ROI 外部を指定色で表示 |
| Culling Color | Culling Mode が ColorOutside の場合の OBB 外部ポイントの色です。 |
| Vertex Color | ON: データ元の色を使用します。OFF: Color 設定の色を使用します。 |
| Color Map | ON: ポイントの高度(Y 座標、ワールド原点基準)に応じてグラデーション色を適用します。 |
| Depth Test | ON: ポイントが手前のオブジェクトに隠れます。OFF: ポイントが常に表示されます(X-Ray 効果)。 |
| Depth Write | ON: ポイントが深度バッファに書き込まれ、後ろのオブジェクトを隠します。 |
| EDL | Eye Dome Lighting を有効にします。 |
| EDL Radius | EDL 効果の影響半径です。値が大きいほど広い範囲を基準に輪郭を強調します。(EDL ON 時) |
| EDL Strength | EDL 効果の強度です。値が大きいほど境界がより暗く強調されます。(EDL ON 時) |
レイヤータイプトグル
ステータスバー右側のトグルボタンでポイントクラウドレイヤーの可視性を素早く切り替えられます。
| ショートカット | 説明 |
|---|---|
| 1 | ポイントクラウドレイヤー表示 (1)トグル |